1

 LED Indicators Wed Jun 21, 2017 4:42 pm
LED Indicators Wed Jun 21, 2017 4:42 pm
AndrewP
active member

Hi everyone,
Little help required please.
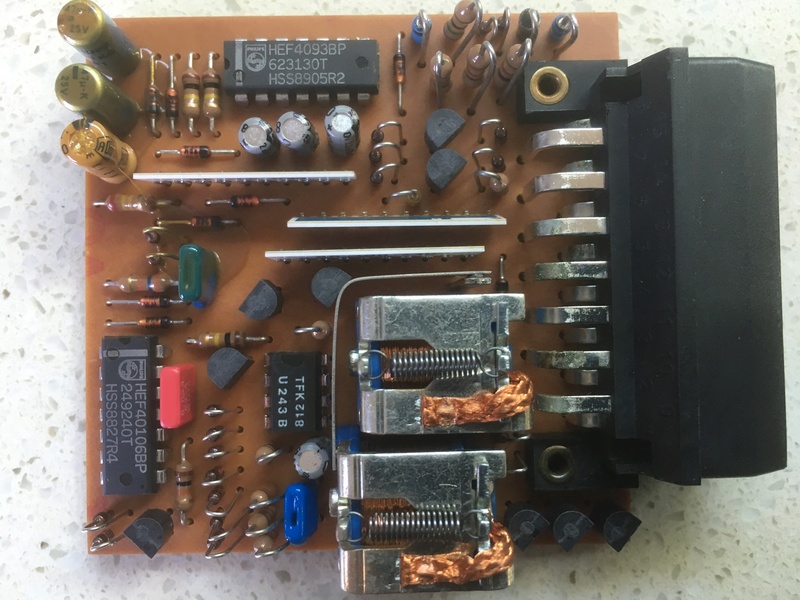
I want to put LED indicators on my 1989 K100 project, I have connected them up and they just light up, they don't flash at all and a beep sound comes from what I think may be the relay ??
How do I make them flash.
I have the tail/brake light changed to LED no problem.
Any help would be much appreciated
Andrew P
Little help required please.
I want to put LED indicators on my 1989 K100 project, I have connected them up and they just light up, they don't flash at all and a beep sound comes from what I think may be the relay ??
How do I make them flash.
I have the tail/brake light changed to LED no problem.
Any help would be much appreciated
Andrew P








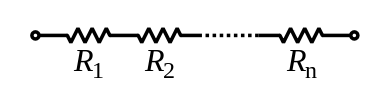 Series
Series Parallel
Parallel